Notes.

《Machine Learning》Note:Linear Regression
2019-04-23 • ☕️ 6 min read
Modal & Cost function
Model Representation
To describe the supervised learning problem slightly more formally, our goal is, given a training set, to learn a function h : X → Y so that h(x) is a “good” predictor for the corresponding value of y.
For historical reasons, this function h is called a hypothesis. Seen pictorially, the process is therefore like this:
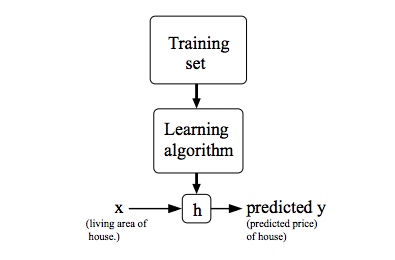
When the target variable that we’re trying to predict is continuous, such as in our housing example, we call the learning problem a regression problem. When y can take on only a small number of discrete values (such as if, given the living area, we wanted to predict if a dwelling is a house or an apartment, say), we call it a classification problem.
Cost Function
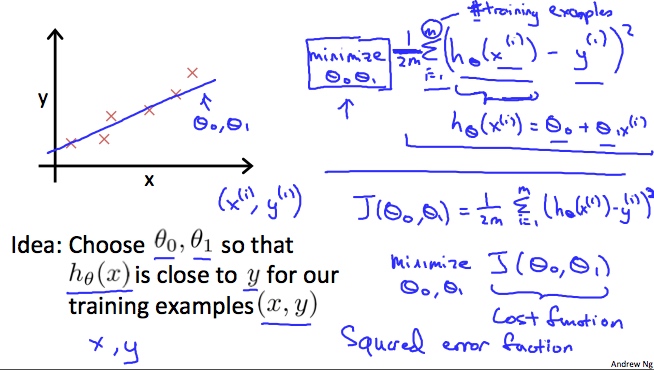
We can measure the accuracy of our hypothesis function by using a cost function. This takes an average difference (actually a fancier version of an average) of all the results of the hypothesis with inputs from x’s and the actual output y’s.
To break it apart, it is where is the mean of the squares of , or the difference between the predicted value and the actual value.
This function is otherwise called the “Squared error function”, or “Mean squared error”. The mean is halved as a convenience for the computation of the gradient descent, as the derivative term of the square function will cancel out the term. The following image summarizes what the cost function does:
A contour plot is a graph that contains many contour lines. A contour line of a two variable function has a constant value at all points of the same line. An example of such a graph is the one to the right below.
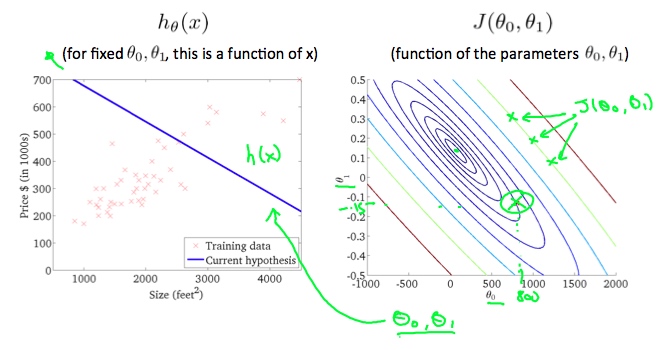
Taking any color and going along the ‘circle’, one would expect to get the same value of the cost function. For example, the three green points found on the green line above have the same value for and as a result, they are found along the same line. The circled x displays the value of the cost function for the graph on the left when and . Taking another h(x) and plotting its contour plot, one gets the following graphs:
![]()
When and in the contour plot gets closer to the center thus reducing the cost function error. Now giving our hypothesis function a slightly positive slope results in a better fit of the data.
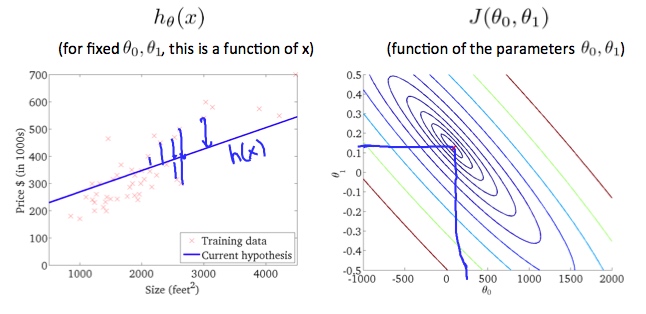
The graph above minimizes the cost function as much as possible and consequently, the result of and tend to be around 0.12 and 250 respectively. Plotting those values on our graph to the right seems to put our point in the center of the inner most ‘circle’.
Parameter Learning
So we have our hypothesis function and we have a way of measuring how well it fits into the data. Now we need to estimate the parameters in the hypothesis function. That’s where gradient descent comes in.
Imagine that we graph our hypothesis function based on its fields and (actually we are graphing the cost function as a function of the parameter estimates). We are not graphing x and y itself, but the parameter range of our hypothesis function and the cost resulting from selecting a particular set of parameters.
We put on the x axis and on the y axis, with the cost function on the vertical z axis. The points on our graph will be the result of the cost function using our hypothesis with those specific theta parameters. The graph below depicts such a setup.
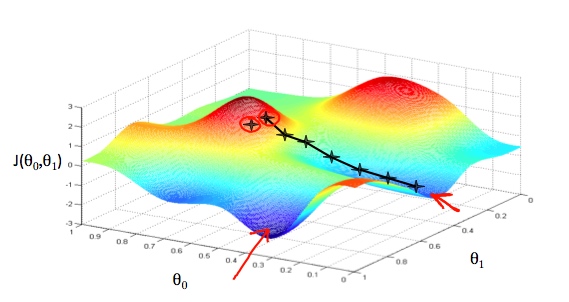
We will know that we have succeeded when our cost function is at the very bottom of the pits in our graph, i.e. when its value is the minimum. The red arrows show the minimum points in the graph.
The way we do this is by taking the derivative (the tangential line to a function) of our cost function. The slope of the tangent is the derivative at that point and it will give us a direction to move towards. We make steps down the cost function in the direction with the steepest descent. The size of each step is determined by the parameter α, which is called the learning rate.
For example, the distance between each ‘star’ in the graph above represents a step determined by our parameter α. A smaller α would result in a smaller step and a larger α results in a larger step. The direction in which the step is taken is determined by the partial derivative of . Depending on where one starts on the graph, one could end up at different points. The image above shows us two different starting points that end up in two different places.
The gradient descent algorithm is:
Repeat until Convergence:
where
j=0,1 represents the feature index number.
At each iteration j, one should simultaneously update the parameters . Updating a specific parameter prior to calculating another one on the iteration would yield to a wrong implementation.
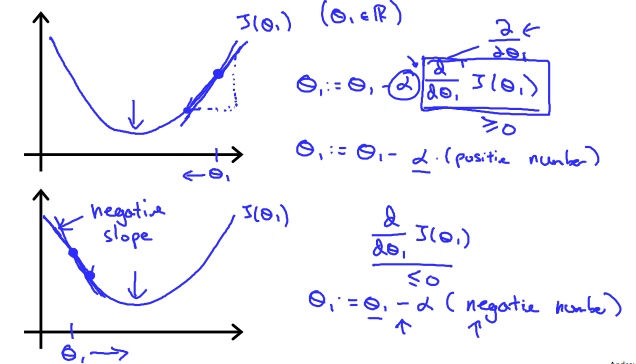
Regardless of the slope’s sign for eventually converges to its minimum value. The following graph shows that when the slope is negative, the value of increases and when it is positive, the value of decreases.
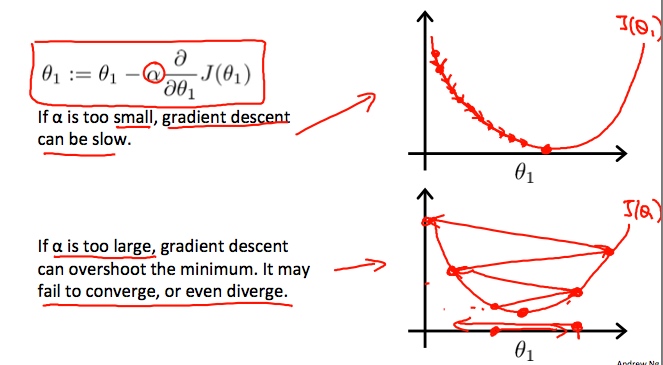
On a side note, we should adjust our parameter α to ensure that the gradient descent algorithm converges in a reasonable time. Failure to converge or too much time to obtain the minimum value imply that our step size is wrong.
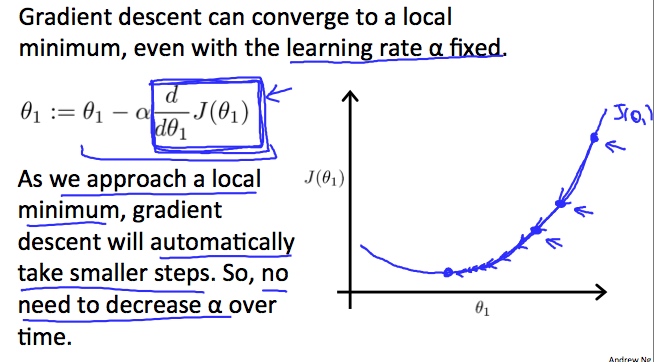
How does gradient descent converge with a fixed step size α?
The intuition behind the convergence is that approaches 0 as we approach the bottom of our convex function. At the minimum, the derivative will always be 0 and thus we get:
Personal blog by Natumsol.
Note thoughts and experience.